框架
1. 架构图及说明
下图为ros2_control的框架架构
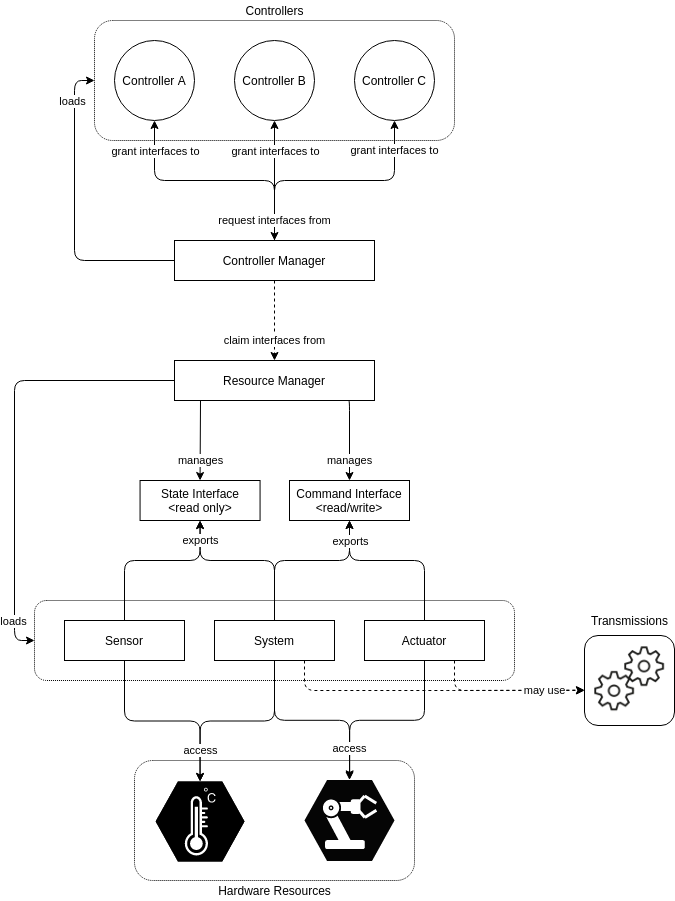
1.1 Controllers (控制器)
这里包括三个控制器(Controller A, Controller B, Controller C),它们的职责是:
向控制器管理器(Controller Manager)请求接口。
一旦接口被授予,控制器可以使用这些接口来执行它们的功能。
1.2 Controller Manager (控制器管理器)
控制器管理器的职责是:
接收控制器的接口请求。
将控制器的接口请求传递给资源管理器(Resource Manager)。
管理和协调控制器之间的接口请求。
1.3 Resource Manager (资源管理器)
资源管理器的职责是:
管理状态接口(State Interface)和命令接口(Command Interface)。
为状态接口和命令接口分配资源。
将请求的接口分配给控制器管理器。
1.4 State Interface (状态接口)
状态接口是只读的接口,负责读取硬件资源的状态信息,例如传感器数据。
1.5 Command Interface (命令接口)
命令接口是读写接口,负责发送命令给硬件资源,例如向执行器发送控制信号。
1.6 Sensor, System, Actuator (传感器、系统、执行器)
这些组件负责:
传感器:收集环境数据或设备状态。
系统:处理和管理传感器数据及执行器命令。
执行器:根据命令接口的指令执行具体操作。
1.7 Hardware Resources (硬件资源)
包括实际的物理设备:
传感器硬件(如温度传感器)。
执行器硬件(如机械手臂)。
1.8 Transmissions (传动装置)
传动装置是硬件资源的一部分,可能被系统或执行器使用,用于传递机械运动或其他形式的物理信号。
2. 结合ros2_control项目树的说明
Note
下面会引入一个 decription 对模型进行描述。
my_robot_control/
├── bringup
│ ├── config
│ │ └── controllers.yaml
│ └── launch
│ └── my_robot_launch.py
├── CMakeLists.txt
├── description
│ ├── launch
│ │ └── view_robot.launch.py
│ ├── ros2_control
│ │ └── my_robot.ros2_control.xacro
│ ├── rviz
│ │ └── my_robot.rviz
│ └── urdf
│ └── my_robot.urdf.xacro
├── hardware
│ ├── mybot_system.cpp
│ └── include
│ └── my_robot_control
│ └── mybot_system.hpp
├── package.xml
├── README.md
├── my_robot_control.xml
└── test
├── test_urdf_xacro.py
└── test_view_robot_launch.py
2.1. Controllers (控制器)
文件位置: bringup/config/controllers.yaml
作用: 定义控制器的配置文件,包含控制器类型、控制策略和参数设置等。控制器管理器根据这个文件加载和管理控制器。
2.2. Controller Manager (控制器管理器)
文件位置: bringup/launch/my_robot_launch.py(此部分并不是实现Controller Manager 的代码)
作用: 启动文件,用于启动控制器管理器、Gazebo 仿真环境和其他必要的节点。控制器管理器负责加载控制器配置文件并管理控制器的生命周期。
2.3. Resource Manager (资源管理器)
文件位置: hardware/mybot_system.cpp
作用: 管理硬件接口和资源,负责分配状态接口和命令接口。资源管理器从硬件中获取数据并将控制命令发送给硬件。
2.4. State Interface (状态接口) 和 Command Interface (命令接口)
文件位置: hardware/mybot_system.cpp
作用: 实现硬件接口,用于读取传感器数据(状态接口)和发送控制命令(命令接口)到执行器。
2.5. Sensor, System, Actuator (传感器、系统、执行器)
文件位置: hardware/mybot_system.cpp 和 hardware/include/my_robot_control/mybot_system.hpp
作用: 定义系统组件,包含传感器数据读取和执行器控制的逻辑。传感器采集环境数据,系统进行数据处理,执行器根据控制命令执行相应操作。
2.6. Hardware Resources (硬件资源)
文件位置: description/urdf/my_robot.urdf.xacro 和 description/ros2_control/my_robot.ros2_control.xacro
作用: 定义机器人模型,通过 URDF 和 xacro 文件描述机器人各部分的物理特性和控制接口。Gazebo 仿真环境使用这些文件进行模拟,实现虚拟机器人在仿真环境中的操作。
2.7. Gazebo Simulation (Gazebo 仿真)
文件位置: description/launch/view_robot.launch.py
作用: 用于启动 Gazebo 仿真环境和 RViz 可视化工具的启动文件。仿真环境模拟机器人的物理行为和交互,RViz 提供实时的可视化。